Welcome to Replicacopys, we offer the best luxury replicas with factory prices and exclusive services for you. People like these popular luxury replicas, because they are looking for good service, guarantee and trustworthy partner. You can find replica watches here and there, but the problem is that you need a very special service. You need to know the materials, the quality and even what you’re paying for. So here, we’re doing that for you! Decades years of experience, 10,000+ happy customers. You can contact our sales representatives directly now and can get information about products, shipping and other aspects of the reel. We are happy to assist you.
Rolex Replicas
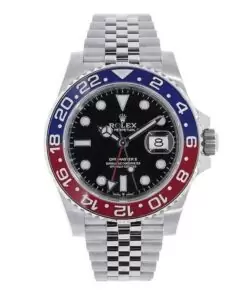
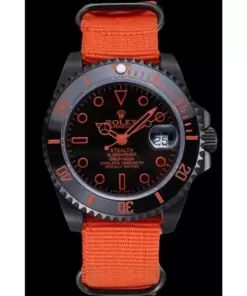
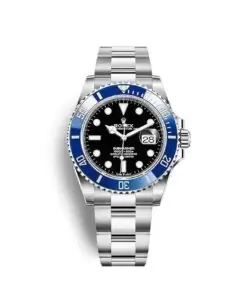
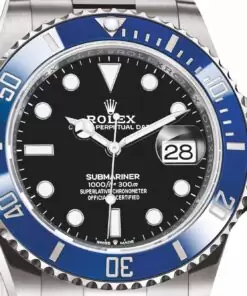
If you are in the market for top quality Rolex replicas, then you are just in the right place. There are various Rolexes for your selection, such as Datejust, Daytona, or Submariner and other series. Our replica Rolexes are made with the best materials and craftsmanship. We use the Swiss movements and components, the quality is guaranteed, and we can ensure that Rolex will keep proper time.
Fake Rolex
For people who are not well-versed in luxury goods, it can sometimes be difficult to distinguish a fake from an authentic one, as replicators continue to improve in their ability to create fakes …… But what you need are a few tricks that only a true expert would know Browse through our fake Rolexes today and find the one that’s perfect for you!
SOLID 904L STAINLESS STEEL
Our Swiss grade replica Rolex watches are made of 904L steel, it is very hard, which makes the production complicated, so the price is more expensive, however, it’s worth it because it rusts and resists corrosion more easily than other steels and holds its polish better than 316L steel.
SCRATCH-PROOF SAPPHIRE CRYSTAL
Why use sapphire crystal? Because it is much harder and therefore not easy to be scratched. Cheap replicas use mineral glass, which is 10 times more fragile than sapphire glass. Sapphire crystal is 9 on the Mohs mineral hardness scale, followed by diamond at 10.
IP65 STANDARD
Our top quality Rolex models characterize a double core silicone “O” ring made of solid tubular rubber, creating an airtight seal that provides decent IP65 water resistance (rain/splash proof).
Useful tips on how to buy a Rolex
You may like the blue and black style of the “Batman” or the beautiful fluted bezel of the replica Rolex 41 mm and so on. But when looking for a very expensive purchase, you have to set a budget to rule out any disappointment.
When considering how much you might spend, think about how often you will wear this watch and how much you are willing to spend on it for those occasions. Is it an everyday office watch, or will it only be worn at weddings?
If this is the first Rolex you’ve owned, luxury watches would recommend the classic Datejust. it’s moderately sized, elegant, and sturdy, making it the perfect choice for day-to-night conversions. It is also available in a variety of metals and dials.
Rolex’s alloys – especially the modern Oyster steel – can withstand years of use with little sign of damage, but the gold ones are more susceptible to scratches and dents, as are the older steel models.
If you’ve started researching what you might want in a Rolex, it’s also worth bearing in mind whether you want the watch to appreciate in value. The main problem you will encounter after finding your dream model is trying to find one that is in stock! The waiting list is very long and interest in Rolex has risen dramatically due to increased disposable income.
To get a brand new fake Rolex you will need to make friends with your nearest Rolex dealer, but Luxury Replica Watches has some great pre-owned items that are especially popular in the vintage market because they are handcrafted, and each watch ages differently.
It is important that you buy from a reputable source and check for authenticity before you buy. Luxury Watches is the first luxury watch retailer to offer NFT in the form of a digital certificate, which adds an extra layer of security to your sale or purchase. It is much more difficult to verify authenticity using sites like us.